In the realm of search and rescue missions and efficient package deliveries, the capacity of drones to navigate unpredictable environments without mishaps is crucial. Although unmanned aerial vehicles (UAVs) have proven adept at maneuvering through open spaces, the challenge arises in the face of moving obstacles, particularly in GPS-deprived indoor settings. Addressing this challenge head-on, Kenji Shimada and his team have pioneered groundbreaking technology facilitating autonomous flights in dynamic indoor environments.
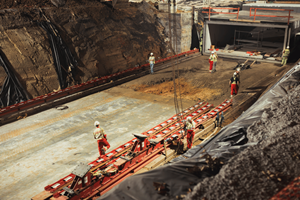
The innovative technologies, encompassing drone navigation and obstacle avoidance, along with dynamic obstacle tracking and mapping, underwent rigorous testing during a recent project. Sponsored by industry partners Toprise Co., Ltd. and Obayashi Corporation, Shimada's drones were tasked with safely navigating an active tunnel construction site in Japan, avoiding collisions with moving human workers.
Shimada, a professor of mechanical engineering, highlighted the industry's recognition of the reluctance among young individuals to engage in hazardous physical work. Consequently, companies are increasingly investing in robotics to bridge the resulting gap.
The drones developed by Shimada and his team excelled in measuring the 3D geometry of the excavation front of the tunnel. This data, when compared to the design specifications, provides builders with insights into the completion status of different tunnel sections, all achieved without exposing individuals to potential risks.
Lead Ph.D. student Zhefan Xu emphasized the significance of this achievement, noting that it marked the first instance of 3D scanning using an autonomous drone in dynamic, under-construction tunnel environments. To predict the paths of moving objects, such as workers within the tunnel, the team introduced a pioneering real-time system utilizing a 3D hybrid map.
This system adeptly considers the static environment while simultaneously tracking dynamic obstacles, allowing the drones to refine their algorithms in real-time to prevent collisions.
The amalgamation of these technologies enables the drones to anticipate potential collision points and take preventative measures. The inspiration for this project stemmed from a sci-fi movie scene depicting a robot inspecting an underground structure, and after a decade of drone research and three years dedicated to this project, Shimada expressed excitement at turning this cinematic vision into reality.
He envisions this technology making a substantial impact on improving the safety of workers on construction sites. The findings of this research were presented at the 2023 International Conference on Robotics and Automation (ICRA) organized by the Institute of Electrical and Electronics Engineers (IEEE).
by Kaitlyn Landram